

近日,开云足球(中国)官方网站机电学院苑进教授团队在《Computers and Electronics in Agriculture》,发表题为“A parallel dual-arm robotic control method of white asparagus based on moving-looking-harvesting coordination and asynchronous harvest cooperation”的最新研究成果。信息学院青年教师张萍老师为第一作者,机电学院苑进教授和辛振波副教授为文章通讯作者,刘雪美教授、戴念祖博士生、王子诺博士生参与了本课题研究,开云足球(中国)官方网站数字孪生农业技术研究中心George Papadakis教授共同参与了该研究。
白芦笋,具有“ 防癌蔬菜”、“蔬菜之王”的美称,目前收获环节仍以人工为主,约占生产成本的50%,是费力最大、耗时最多的环节,也是芦笋全程机械化生产的唯一瓶颈。然而,随着人口老龄化,劳动力短缺现象逐渐加剧,导致在采收季节难以招募到足够的工人。因此,亟需开发具有选择性收获能力的采收机器人,以解决收获季节劳动力不足的问题,降低收获成本,提高收获效率。不同于空中作业的果品机器人,白芦笋属于土中选择性采收,且分布较为稀疏,选择性采收过程大的离散性决定了其无法达与批次收获相同的高速性能。为了实现高速采收,需要实现“不停车”的采收方式,需要移动平台、采收部件、目标感知系统、集成控制系统即“脚、手、眼、脑”的组合和协调,存在感知与执行部件间的协同控制困难。
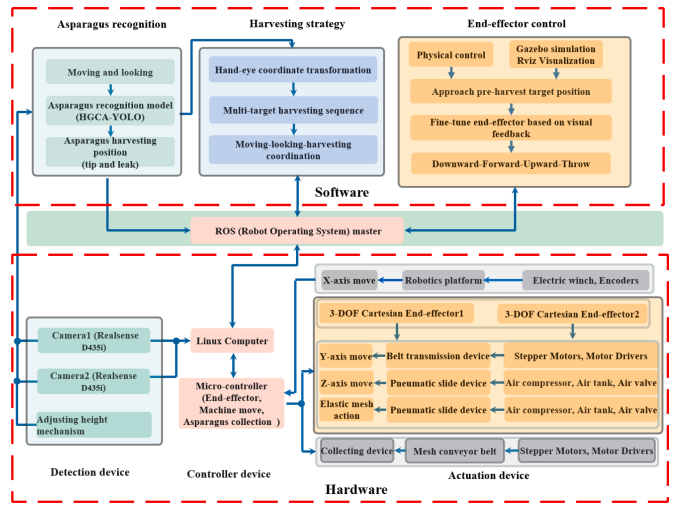
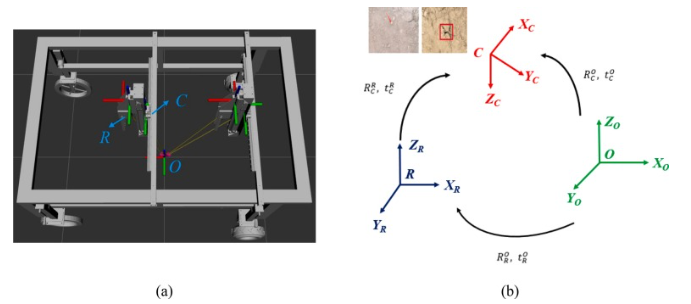
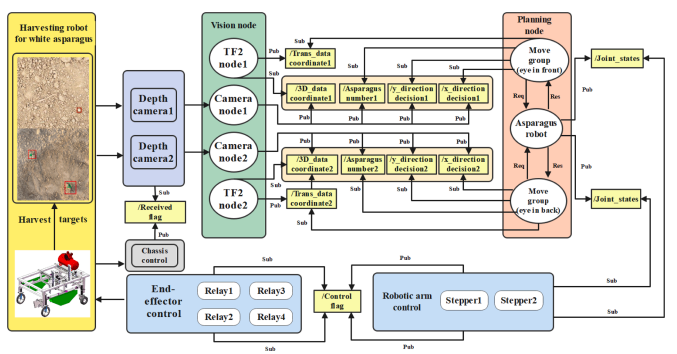
针对以上技术难题,开云足球(中国)官方网站苑进教授团队提出了一种选择性采收过程中笋芽识别、机械臂运动、末端执行器采收即“走-看-采”协同的控制策略以及双机械臂区域独立的高效采收协同算法,研究了基于ROS的多机械臂选择性采收智能控制系统,进行了软硬件系统集成、调试及优化,提高了作业效率,降低了漏采率。
该研究得到了国家自然科学基金的资助。
论文链接: https://doi.org/10.1016/j.compag.2025.110046
编 辑:万 千
审 核:贾 波





