

近日,机电学院苑进教授团队在Smart Agricultural Technology在线发表了题为“Dynamic impact mechanical damage analysis and tomato robotic post-picking crating optimization based on multiscale finite element model”的研究论文。硕士研究生卢国航为论文第一作者,苑进教授与刘雪美教授为论文通讯作者,开云足球(中国)官方网站数字孪生农业技术研究中心George Papadakis教授共同参与了该研究。
果蔬采收机器人技术能有效应对劳动力稀缺挑战,发展前景极为广阔。然而在果实分离后水果输送装箱过程中,易受机械损伤可能导致存质量下降、显著影响货架寿命的问题不容忽视。目前,大多数果蔬采收机器人设计为紧凑型,以适应果蔬种植环境,但在高效采收与采后果实损伤之间的协调性方面尚未达到理想状态,对于适应紧凑结构集箱方案研究仍存在诸多空白。因此,开发一种与采摘并行的无动力果实集箱方案,并结合适宜的损伤模型进行损伤分析,以实现高收获效率和低水果损伤,已成为一个亟待解决的问题。
面对前述技术挑战,苑进教授团队以自主研发的番茄采收机器人为基础,对番茄采后的集箱过程及其方式进行了深入研究。团队创新提出了一种基于双层缓冲无动力柔性集箱技术用于采摘机器人设计。在确保与末端执行器并行运作的同时,该方案显著减少了果实在集箱过程中的机械损伤,满足了高效且低损采收需求。相较于单一介质的伯格斯模型,该团队采用多尺度有限元模型对番茄集箱过程中的损伤情况进行了更为精细的仿真模拟,并据此建立了番茄损伤评价指标。基于这些指标,团队进一步对提出的无动力双缓冲系统进行了参数优化。这项研究的意义不仅局限于番茄采摘后的集箱处理,更为柔性处理各类新鲜果蔬提供了一个新框架,对于提升采收效率和降低损失意义重大。
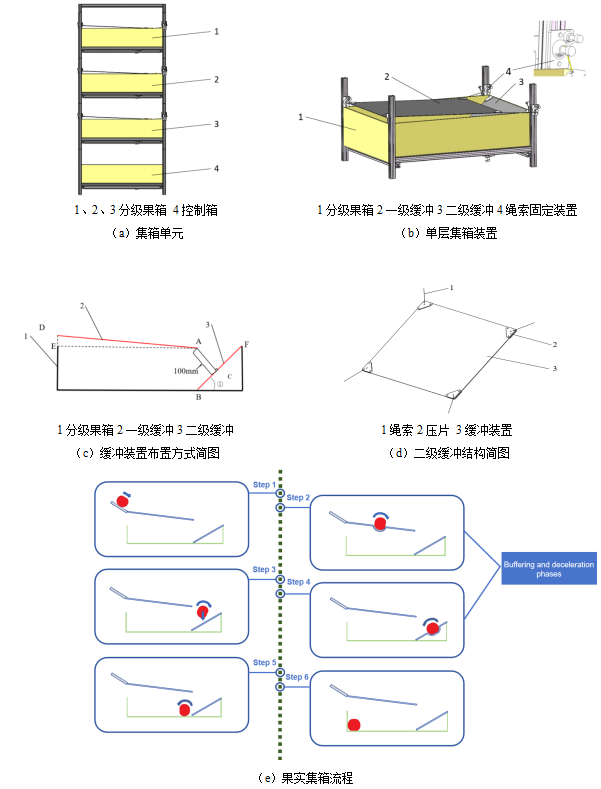
图1. 双层缓冲集箱装置结构及集箱流程图
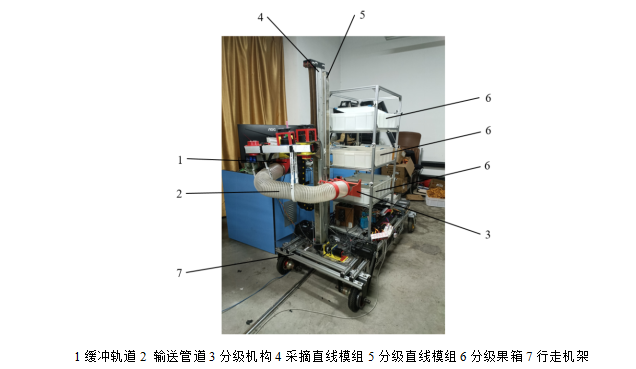
图2. 番茄采收机器人平台
该研究得到了国家自然科学基金、山东省棉花产业技术体系与产业创新团队项目资助。
论文链接:https://doi.org/10.1016/j.atech.2024.100742
编 辑:万 千
审 核:贾 波





